小型阵摇式水果采摘机
作品赛道
工业产品类
作品描述
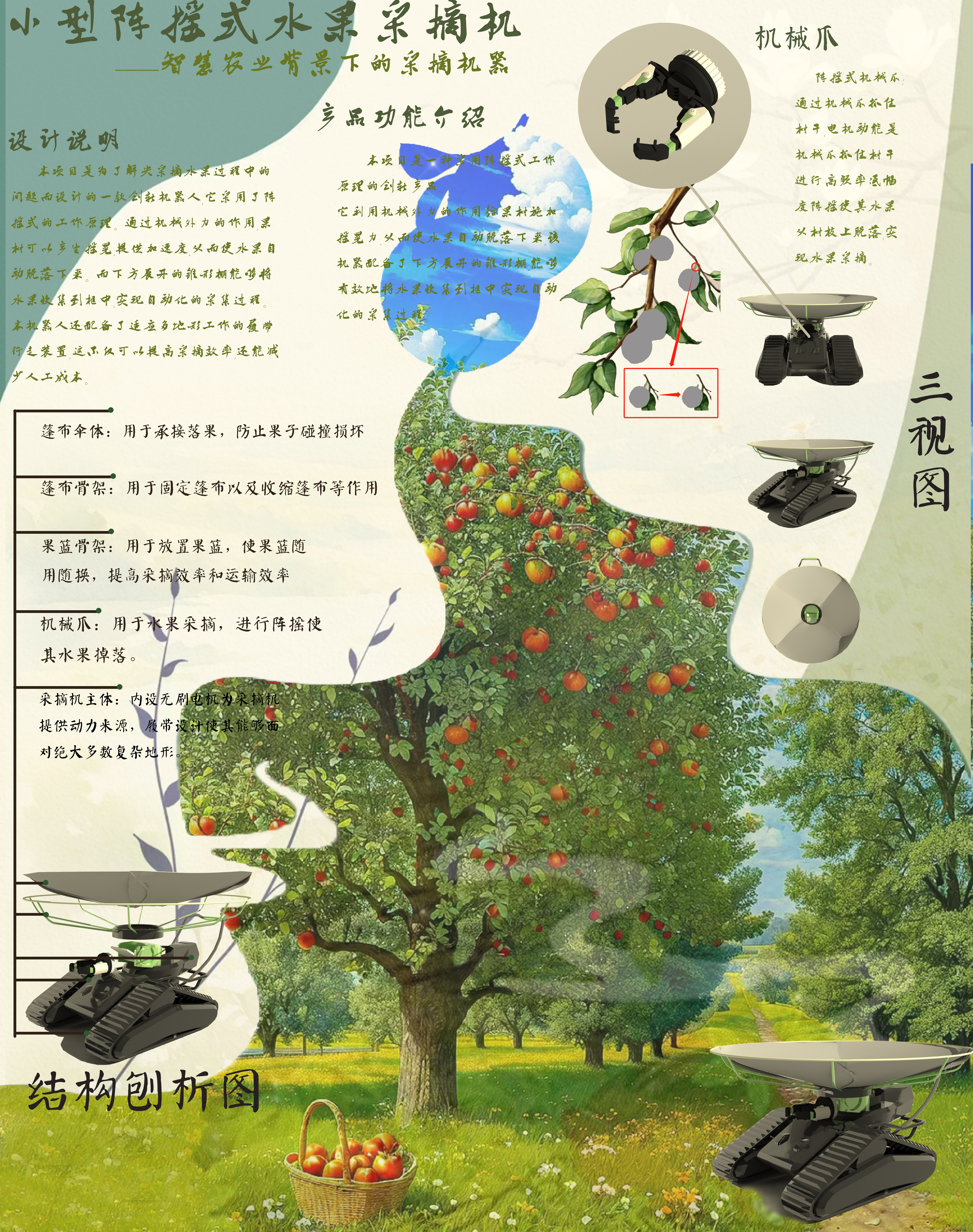
本项目是为了解决采摘水果过程中的问题而设计的一款创新机器人,它采用了阵摇式的工作原理。通过机械外力的作用,果树可以产生摇晃,提供加速度,从而使水果自动脱落下来。本机器人配备了适应多地形工作的履带行走装置,不仅可以提高采摘效率,还能减少人工成本。它可以根据不同果树的形态调整,同时,锥形棚的设计使得水果能够有序地滑落到框中,避免水果因掉落不当而受损。这种设计提高采摘效率,减少水果损失,降低采摘成本。
当前票数:0