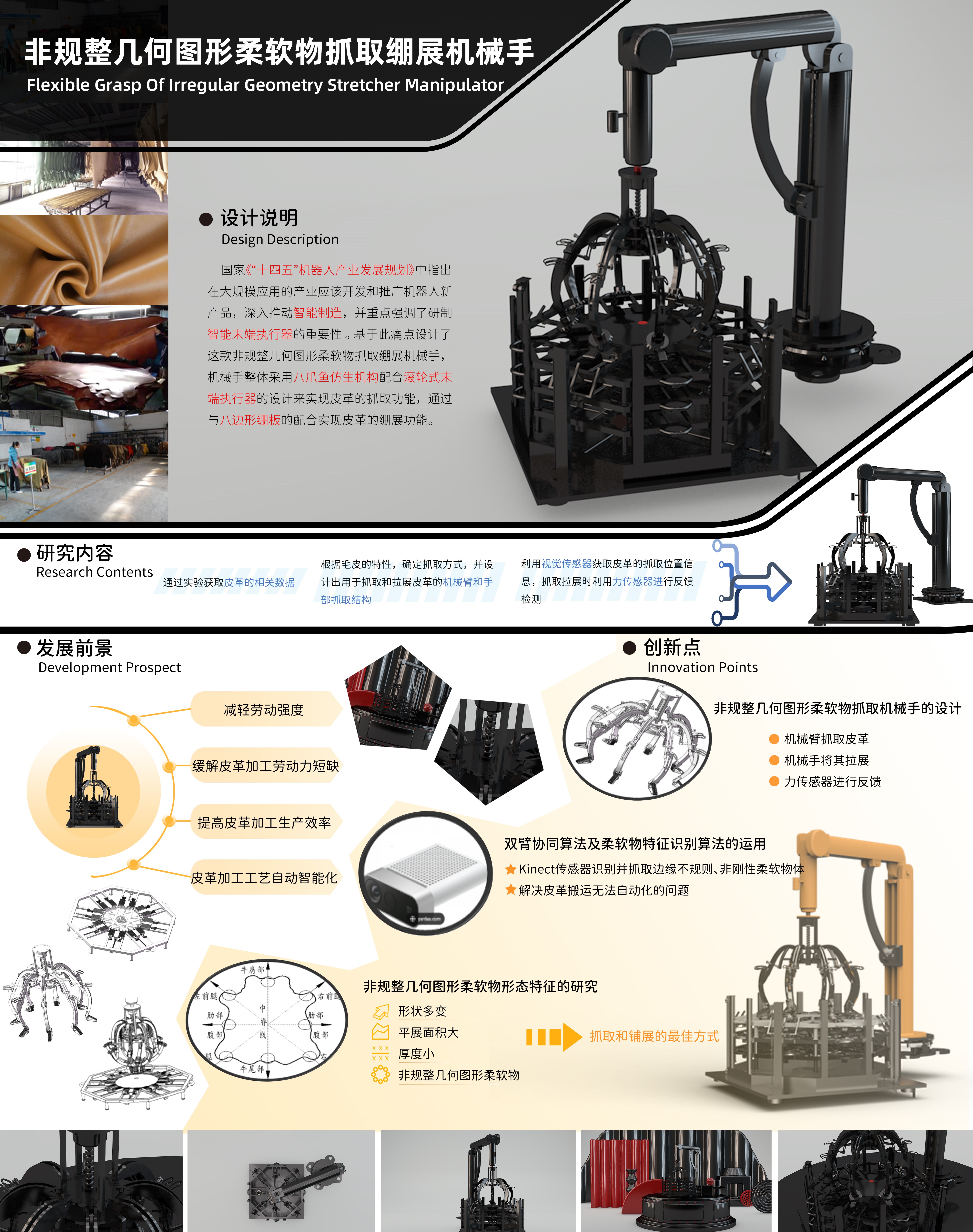
非规整几何图形柔软物抓取绷展机械手
作品赛道
文化创意类
作品描述
国家《“十四五”机器人产业发展规划》中指出在大规模应用的产业应该开发和推广机器人新产品,深入推动智能制造,并重点强调了研制智能末端执行器的重要性 。 基于此痛点设计了这款非规整几何图形柔软物抓取绷展机械手,机械手整体采用八爪鱼仿生机构配合滚轮式末端执行器的设计来实现皮革的抓取功能,通过与八边形绷板的配合实现皮革的绷展功能。
当前票数:0