一种交通锥移动机器人
作品赛道
文化创意类
作品描述
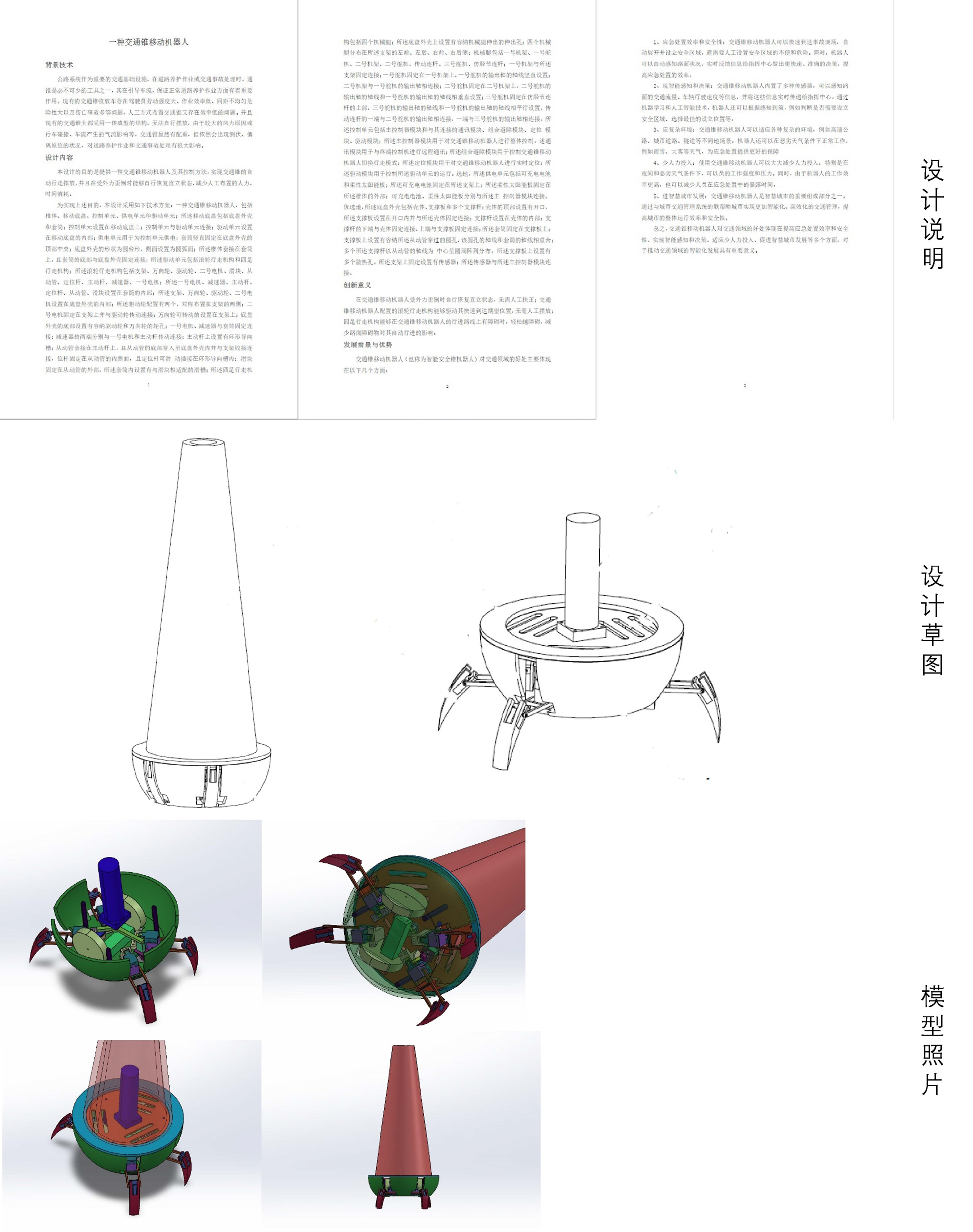
现有的交通锥收放车存在驾驶员劳动强度大、作业效率低、间距不均匀危险性大以及伤亡事故多等问题,人工方式布置交通锥又存在效率低的问题。本设计的目的是提供一种交通锥移动机器人及其控制方法,实现交通锥的自动行走摆放,并且在受外力歪倒时能够自行恢复直立状态,减少人工布置的人力、时间消耗。
当前票数:0