通用型缆控水下机器人
作品赛道
文化创意类
作品描述
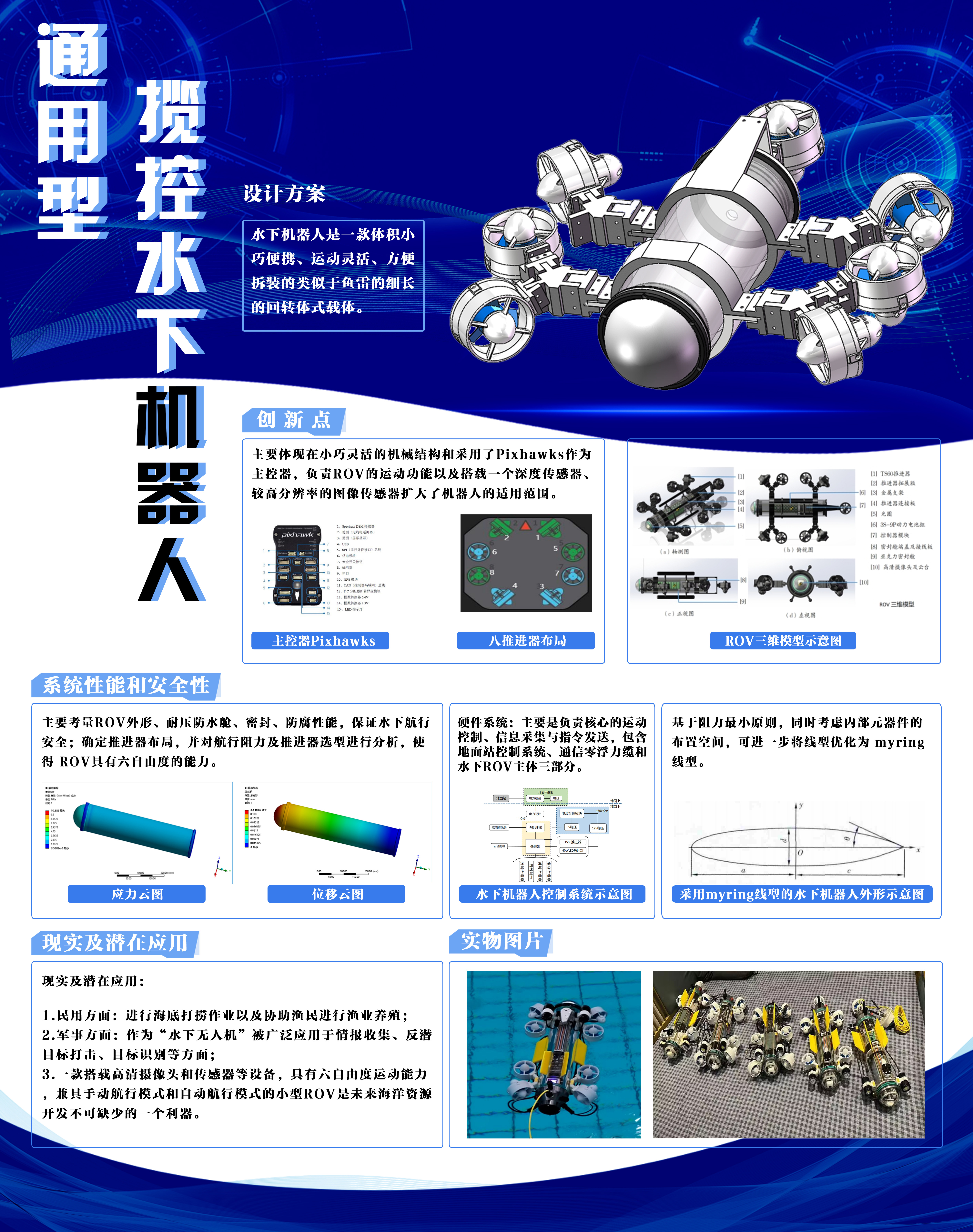
水下机器人设计成类似于鱼雷的细长的回转体式载体,采用了Pixhawks作为主控器,负责ROV的运动功能。主控制器 Pixhawks上有陀螺仪、加速度计、磁力仪等多个传感器同时工作,以获取更精确的姿态。还搭载一个深度传感器,以获取其深度信息,使得ROV整体运动稳定精准;ROV的图像采集主要考虑到了清晰度、体积和功耗等方面,当前 ROV采用了具有较高分辨率的图像传感器。
当前票数:0