仿生机械寻路狗
作品赛道
文化创意类
作品描述
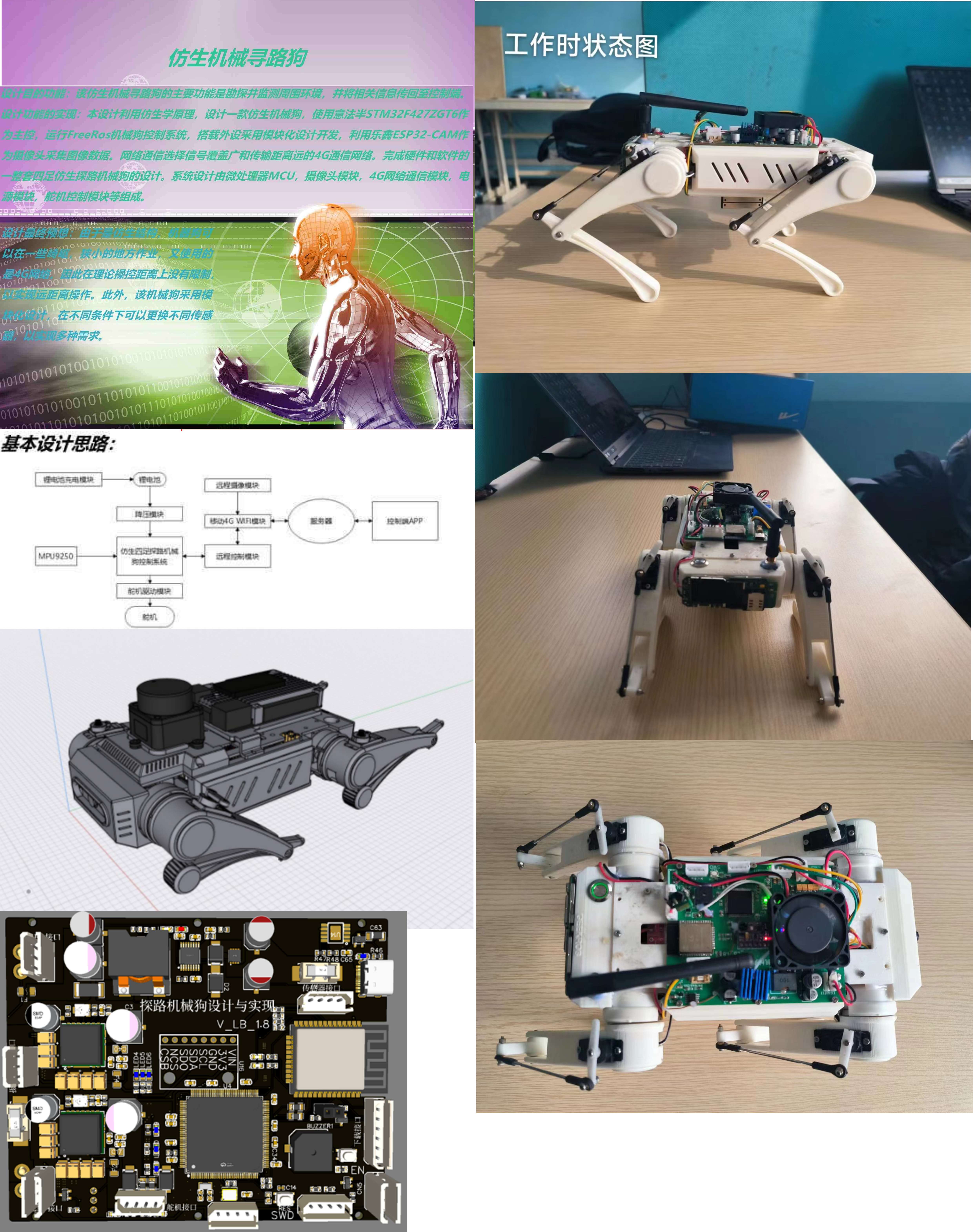
设计目功能:该仿设计的主要功能是勘探并监测周围环境,并将相关信息传回至控制端。
设计功能实现:利用仿生学原理,意法半STM32F427ZGT6作为主控,FreeRos机械狗控制系统,外设采用模块化设计开发,乐鑫ESP32-CAM作为摄像头采集图像数据。网络通信选择4G通信网络。。系统设计由微处理器MCU,摄像头模块,4G网络通信模块,电源模块,舵机控制模块等组成。
当前票数:0