爬树式智能花椒采摘机器人
作品赛道
工业产品类
作品描述
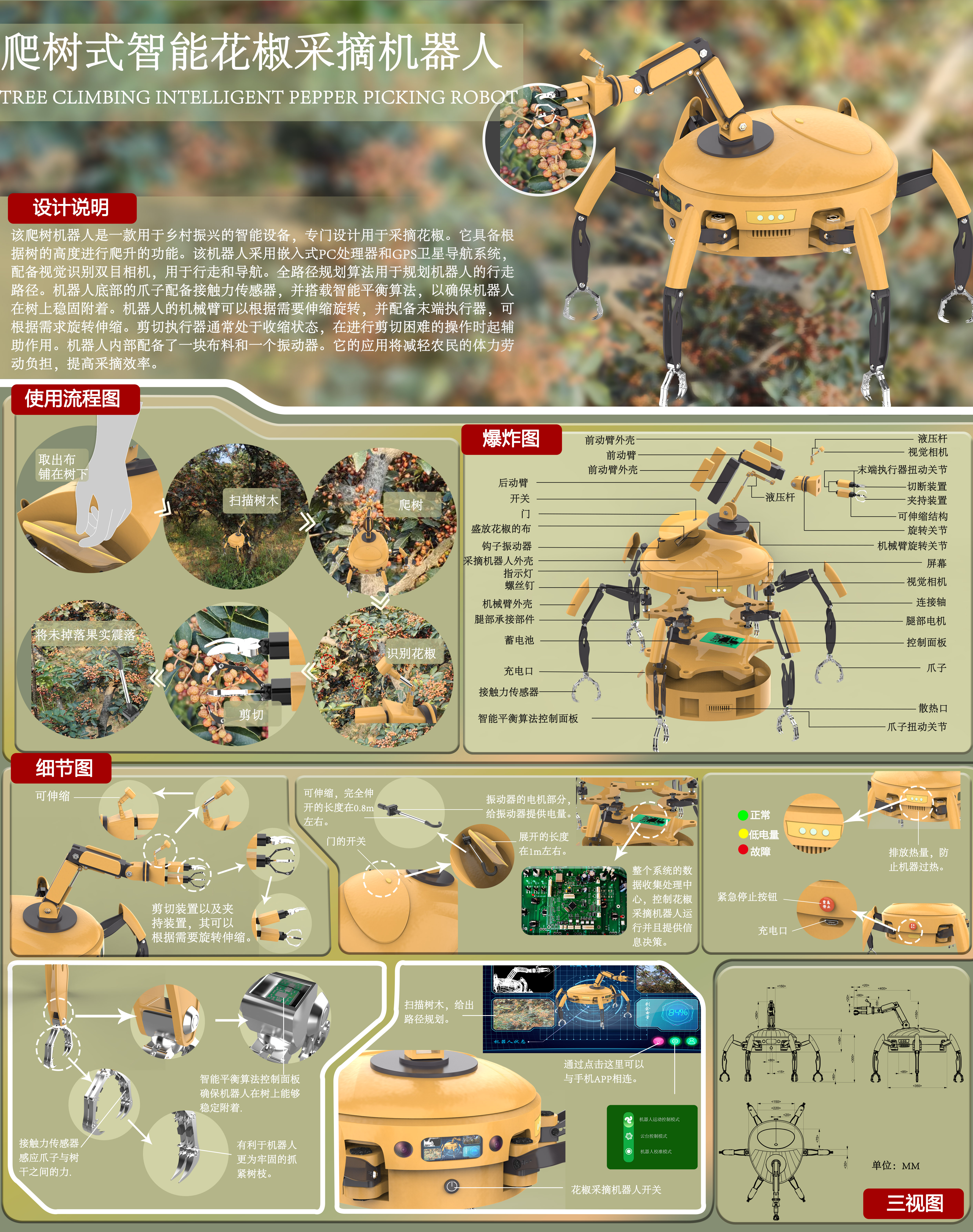
该爬树机器人是一款用于采摘花椒的智能设备。它能根据树的高度进行爬升。其采用嵌入式PC处理器和GPS卫星导航系统,配备视觉识别双目相机,用于行走和导航。全路径规划算法用于规划机器人的行走路径。机器人的爪子配备接触力传感器,并搭载智能平衡算法,以确保机器人稳固附着。机器人的机械臂配备末端执行器,可根据需求旋转伸缩。夹持执行器通常处于收缩状态,在剪切困难时起作用。机器人内部还配备了一块布料和一个振动器。
当前票数:0